
Research
Animal Flight
Robotics & Learning

Home
People
Research
Publication
Teaching
Biological & Robotic Intelligent Fluid Locomotion (BioRob-InFL) Lab
Mechanical and Nuclear Engineering
The Pennsylvania State University
011-013 Reber Building, University Park, PA
buc10@psu.edu
Copyright by Bo Cheng 2018
All rights reserved

BioRob-InFL Lab
Biological & Robotic Intelligent Fluid Locomotion

Robotics-&-Learning Projects
Fluid-Dynamics Projects







Machine Learning of Flapping-Flight (Active Project)

Animal-Flight Projects
Stability of Leading Edge Vortex (Active Project)
Unsteady Aerodynamics of Flapping Flight (Active Project)
Flapping and Pitching Perturbed Revolving Wings
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
Formation Vorticity Dynamics of Leading Edge Vortex (Active Project)
Online-Learning of Caudal-Fin Flapping using Policy Search (Active Project)




Bio-inspired aerial and underwater robots have been recognized as one of the critical technologies in the future. Their unparalleled maneuverability and stability will allow both civil and military operations in confined, dangerous, or inaccessible spaces. While our current focus is on the acutator design, fabrication and control, we will extend our effort torward system integration and automous flight in the near future.
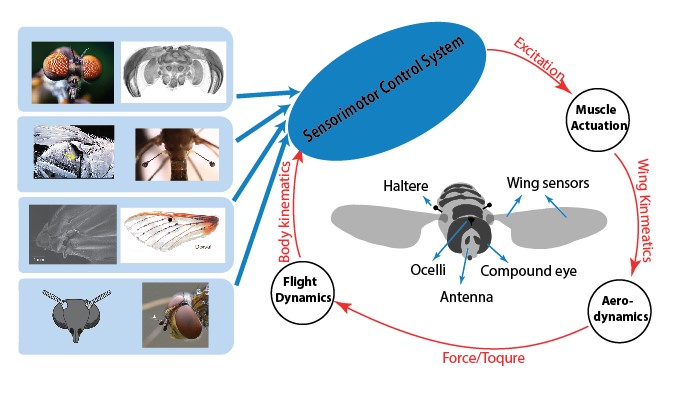
Knowledge and theories of animal locomotion not only expand the boundaries of fundamental science but also inspire the next-generation robotics. Compared with conventional air vehicles, insects and birds are able to achieve unprecedented flight maneuverability and stability in highly dynamic and uncertain enviroments. This is due to the intricate control of flapping wing motion and exploition of unsteady aerodynamics through fast coordination of neural sensing, control and muscular actuation systems.
Through the course of evolution, flying animals have been successfully experimenting the aerodynamics and have learned how to exploit unsteady and rotational (three dimensional) flow in the surrounding air. Compared with the well-understood aerodynamics for airplanes and rotorcrafts, fluid dynamics for animal locomotion at low Reynolds number (10-10,000) still awaits further investigations.

Flapping Counter Torque (FCT): Inherent Passive Damping in Flapping Flight
The research in our lab coalesces traditionally isolated areas to advance the understandings of the complex flight systems of insects and birds at minature scale from system and control perspectives. The understandings of these highly stable, maneuverable and arguably energy efficient flying machines in nature will also inspire designs in robotics, in paritucalr in developing the next generations of unparalleled biomimetic robots for their greater adaptability and maneuverability in complex and unstructured environments than today's conventional robots.
Speed Control of Bluebottle flies in MAGLEV Flight Mill (Active Project)
Inverted Landing in Flies (Active Project)
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
Flapping-Wing Micro Air Vehicles using High-Frequency Electromagnetic Actuator
BioRob-InFL
Fluid Dynamics