HOME
I am Miguel Moll Pujols and I’d like to welcome you to my mechatronics Final Project webpage!
XPC Project
The Goal of the project was to create a system constituted by two batteries, two motors, a Roboteq controller, two encoders and a desktop used as XPc. This project intended by reading the encoders to design a control over the motors in a close loop feedback.
|
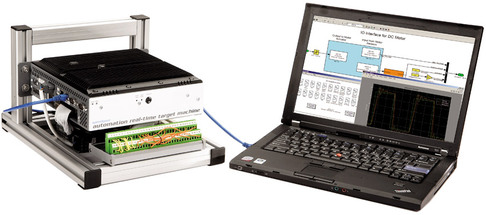
xPC Target™ enables you to execute Simulink® and Stateflow® models on a target computer for rapid control prototyping, hardware-in-the-loop (HIL) simulation, and other real-time testing applications. It provides a library of I/O device drivers, a real-time kernel, and an interface for real-time monitoring, parameter tuning, and data logging.
|