
The goal of this project is to develop predictions of vehicle mobility with particular focus on comparing autonomous, teleoperated, and human-driven vehicles. The scope includes theoretical work all the way to field implementation tests of the theory. This project, sponsored by US DOD funding, supports 2 grad students (US citizens only) with emphasis on PhD studies.

The IVSG team is highly involved with the SAE Autodrive 2 competition, which is a collegiate multi-university competition to develop and field autonomous vehicle algorithms and compete in vehicle performance categories each year. The competition started in 2021 and IVSG is particularly involved with lane-tracking and map-based navigation algorithm development. The team is roughly 60 students, with one grad student supported as a GRA to be the team lead. This GRA position is currently open (as of 10/2021) with very strong preference for a PhD student given the 4-year scope. For more information, click here

This project is part of the USDOT Automated Driving System (ADS) Demonstration Grants, and is the largest grant within that program. We are working with PennDOT, Carnegie Mellon University (CMU), HNTB, Deloitte, QualComm, and others to design, test, and deploy smart construction zones and tests of the same that assist Autonomous Vehicles during construction zone traversals. Our particular work in this 4-year project is to develop methods to map and share construction zone information, simulate the operations in CARLA with traffic, and test deployments at our test track and at sites around Pennsylvania. This project supports 1 post-doc, 2 grad students, and several undergrads. For more information, click here

This medium-scale NSF-sponsored project seeks to develop methods for databases to intentionally "forget" information so that current decisions made by Connected and Autonomous Vehicles (CAVs) do not rely on outdated information. The scope of this project includes redesign and reconstruction of a smart CAV, deploying algorithms on that vehicle and in simulation to estimate road friction from steering force information, pushing and pulling this information from GIS-referenced databases of road friction on complex road networks, testing Model-Predictive Controllers that guide the vehicle on friction-compromised roads that utilize this information, and studying methods of organizing and sharing the data that preserve information quality via Allan Variance methods. The project supports 2 grad students as GRAs and several undergrads. For more information, click here

The research group has access to the test track at the Thomas D. Larson Pennsylvania Transportation Institute, one of ten USDOT-designated automated vehicle proving grounds. For more information, click here

Working with ARL, our team is heavily involved with testing, sensing, and control related to off-road ground robotic systems, particularly bomb-disposal robots, extra-planetary rovers, and military vehicles.

Our team has developed many different driving simulator tools including immersive environments, 6 DOF motion base tractor simulator with surround screens, and tractor-trailer simulators. For more information, click here

Our team operates and supports a mapping van system to produce digital maps of roadways. For more information, click here

Our team works closely with Prof. Craig Beal at Bucknell University (about 1 hour away from PSU) in testing, operating, and maintaining the "P1" test vehicle, a vehicle originally built at Stanford University within Prof. J. Chris Gerdes' lab. This vehicle has a rich history as a forerunner to many major research vehicle team developments within the Autonomous Vehicle community. In 2019, a substantial rebuild was started to upgrade the vehicle's power, drivetrain, computation, sensing, and control hardware. For more information, click here

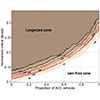
This research seeks to determine the feasibility of detecting the instability of oncoming vehicles using optical flow from a stereo camera. A "visual odometry" method was selected to estimate the egomotion of an instrumented mapping vehicle from its onboard stereo camera and inertial measurement unit (IMU) data. This method analyzes optical flow to estimate the egovehicle's translational and rotational motion. Next, the algorithm classifies features as either static or dynamic to detect dynamic vehicles. Once detected, optical flow analysis then estimates the external vehicle's states using extracted features from the moving egovehicle. This process enables the novel concept of using optical flow to detect an oncoming vehicle's instability. The detection of vehicle instability is greatly aided by location context that can be used to warn drivers of imminent risk. To provide context, this research considers the use of a map to isolate instabilities that may result in entry of the egovehicle's lane. Specifically, a map provides additional knowledge of an external vehicle's road radius from position measurements and map data. This permits the estimation of a external vehicle's neutral steering yaw rate. If the external vehicle's measured yaw rate is in excess of its estimated neutral steering yaw rate, this then indicates instability and a likelihood that the vehicle will be unable to maintain consistent lane tracking. The underlying algorithms were tested offline with data collected from The Pennsylvania State University's mapping vehicle and a precisely controlled test vehicle at The Pennsylvania State University Larson Transportation Institute Test Track. While this concept's validation was limited - and not the direct goal of this research - the results show promise for this concept's feasibility and future validation. When deployed as an Advanced Driver Assistance System (ADAS) on a moving vehicle, it can ensure early detection of an oncoming vehicle's instability, prompting increased caution to mitigate collision risks. Furthermore, when deployed statically at an intersection, it can detect low friction-areas based on common areas of vehicle instability, prompting remedial action to fix the roadway. In both situations, this novel concept has the potential to reduce roadway fatalities and serious injuries. (Investigators: Chris Monaco, Dr. Sean Brennan)

This project is in collaboration with researchers from Penn State, UNC-Charlotte, MIT and Volvo Group North America. The goal of this project is to develop a model-predictive control system that will exploit vehicle connectivity to reduce fuel consumption for 2016-model internal combustion vehicles by 20% without compromising emissions, drivability, or mobility. This technology will be valuable for different vehicle sizes (light, medium, and heavy duty) and engines (gasoline and diesel). The project will bring together industry and academia to demonstrate the technology in simulation, on a chassis dyno, and on the road for the Volvo VNL 300 heavy diesel truck. Our technology combines four main features. First, we will utilize vehicle-to-infrastructure/vehicle communications to anticipate traffic patterns and signals. Second, we will develop algorithms for coordinating vehicle activities such as platooning and departures/arrivals at intersections. Third, we will optimize chassis/vehicle control decisions, such as routing and speed setpoint trajectories. Finally, we will also optimize powertrain decisions such as driveline disengagement during coasting, gear shifting, accessory control, and (where available) decisions on engine start/stop and cylinder de-activation. These four features will operate in an integrated manner to achieve co-optimized and coordinated control. This will allow vehicle controllers to operate in a predictive manner that takes into account the collective impact of all the above decisions on vehicle fuel consumption, drivability, mobility, and emissions. The end product of our innovations will be a real-time software suite for fuel economy optimization, intended for vehicles with Level 1 automation or higher, and designed with cyber-security in mind, in the sense of using sensor fault diagnostics methods to determine if any agents are communicating malicious information. The Intelligent Vehicles and Systems Group (IVSG) portion of the project included setting up validation testing hardware and running on-road tests to collect data off the instrumented truck that was used by the team at large. IVSG also be created, set up and ran experiments to mimic connected vehicle scenarios such as platooning, terrain look-ahead and traffic intersection control. (Penn State Investigators: Mohamed Wahba, Evan Pelletier, Sean Brennan plus several other faculty groups both at PSU and outside; Sponsor: This work is supported by the Advanced Research Projects Agency-Energys (ARPA-Es) NEXTCAR program.)

With the rise in research in semi- and fully-autonomous vehicles over the past 30-40 years, environmental maps of the roads are becoming increasingly more important. These maps provide an extended lookahead distance for automated vehicles, as the field-of-view of on-board sensors may be occluded due to local traffic, buildings, or even sun flares. This mobile-mapping platform can createhigh-fidelity maps of the roads with the equipped array of HD cameras, including a 360 degree field-of-view Occam camera, SICK and Velodyne Laser Rangefinders, and a Novatel INS GPS System capable of achieving centimeter-level position accuracy. (Investigators: Dr. Sean Brennan, Bobby Leary)

The goal of this project is to study how vehicle operators interact with technological assistance systems in safety-critical situations. For this purpose, the vehicle dynamics simulator was developed using open source softwarethe Robot Operating System (ROS) to interface with hardware, plus the Blender Game Engine to generate the 3D virtual environments and simulations a MOOG motion base with 6 degrees of freedom and a 360 degree surround screen. The research outcomes are focused on preventing rollover incidents on farm tractors by addressing two key issues. First, studying how the drivers perceptual errors of roll and pitch angles might affect their assessment of rollover risk. Second, determining how an alert system could be used to improve the operators awareness while driving in high rollover risk situations. The simulators modular software allows it to change virtual environments and vehicle dynamics, as well as connect to other Hardware-in-the-loop platformsincluding other driving simulators. (Investigators: Nicolas Ochoa, Dr. Sean Brennan, Dr. H.J. Sommer III, Dr. Dennis Murphy; Former Investigators: Kevin Swanson, Dr. Alexander Brown)

Technology supporting visual and motion realism has progressed dramatically in the past two years, even allowing the commoditization of motion capture and head-mounted immersive displays (HMDs). Simultaneously, the ubiquity of low-cost data enables simulated visual environments to achieve near photo-realism. This has the potential to revolutionize both research practice and the designed artifact. However, there are fundamental behavioral differences between virtual reality (VR), augmented reality (AR), and realenvironment interactions. These behavioral differences are known to vary with user characteristics such as age, gender, and expertise.It is unclear how levels of user immersion affect risk-taking and other behaviors. The proposed effort will quantify and model this andrelated behaviors by identifying the relationship between risk compensation behavior and levels of immersion. (Investigators: Dr. Sean Brennan, Dr. Matt Parkinson, Bobby Leary, Kannan Anil Kumar, Nick Dow, Stefan Topper, Krishna Prasad, John Barczynski, Guangyu Zhou; This project is funded under the National Science Foundation (NSF) Grant No. 1635663.)
![]()
Epileptic seizures have similarities to brain storms, yet we have no systematic way that reliably detects impending seizures. We propose the use of model based assimilation of seizure data to reconstruct and track EEG dynamics using metrics of generalized synchronization and innovation error to gauge tracking accuracy. Preliminary results demonstrate the ability of a single node Wilson-Cowan neural model to track and reconstruct the 2-layer dynamics for an electrode near a cortical seizure focus. This is the first demonstration of the use of an ensemble Kalman filter and a fundamental nonlinear model representing cortical dynamics, to be used to track human EEG. We are currently expanding tracking to incorporate 2-dimensional sheets of nodes, in the same geometry as the human EEG grid data, and analysis of the controllability and observability of such systems are being computed. Published results to appear in IEEE and PRL. (Investigators: Andrew Whalen, Dr. Sean Brennan, Dr. Steve Schiff; Sponsors: National Institute of Health (NIH))

Spreading depression (SD) is a dramatic depolarization of brain that propagates slowly and is the physiological underpinning of the initial aura in migraines. This study proposes to represent SD in computational models of the underlying neuronal biophysics, and apply mitigating electrical stimulation using model-based control strategies. The project starts by developing an experimental preparation using a tangential 2-dimensional visual cortex rodent brain slice. SD is triggered with a perfusate potassium perturbation, and SD is imaged using a sensitive CCD camera that detects the intrinsic optical imaging signal associated with index of refraction changes from cellular swelling. A model-based strategy similar to that used in autonomous robotics such as airframe autolanders is employed. A hardware and software control system takes the optical image in real-time, fuses it with a model of SD, reconstructs the underlying physiological processes, calculates needed control, and modulates an electrical field to modulate SD. This will be the first experimental demonstration of model-based control of a neuronal network. A transdisciplinary German-American educational collaboration has been formed where the researchers (and PIs) synergistically work together within the interface between computational neuroscience, control theory, experimental neurophysiology, and control system engineering. As a collaborative partnership, we anticipate that what is learned in controlling SD may provide a set of testable strategies for electrical control of migraines in people who suffer from severe migraine attacks and are pharmacologically intractable. (Investigators: Andrew Whalen, Dr. Sean Brennan, Dr. Steve Schiff; Sponsors: National Institute of Health (NIH))

The goal of the ROAR project was to investigate the potential for partially automating garbage collection with robots. A demo for the project in late 2015 (embedded below) showed how a garbage truck, a quadcopter, and a four wheeled robot could collaborate to bring garbage bins from a house back to the truck and empty it. (Investigators: Jariullah Safi, Mohamed Wahba, Dr. Sean Brennan; Partnerships with Chalmers and Morlardalens Hogskola in Sweden)
Roadway departure is a leading cause of vehicle accidents, and most recent research on roadway departure prevention systems focuses on on-pavement trajectory recovery. However, the detection of lane departures is not easy, and current methods are heavily dependent on vision-based sensors. Unfortunately, such lane detection often does not work under inclement weather conditions, which are a major cause of roadway departure accidents. Few studies have investigated whether one can detect road departure by using other sensors, for example detecting changes in tire forces and resulting body motion due to transitions to off-pavement conditions. This research aims to identify transition from on-road to off-road condition by looking at changes in vehicle dynamics, specifically in vehicle yaw rate and sideslip angle. This approach is based on well-known vehicle models and comparing these to measurements from a GPS/INS system to obtain real-time estimates of model agreement with measured data. (Student supported: Hang Yang)

Vehicle rollover remains one of the deadliest types of automobile accident. This research estimates the minimum preview time needed to prevent untripped wheel lift events by analyzing simple maneuvers expected in collision avoidance situations. To predict a vehicle's future rollover propensity, the Zero-Moment Point (ZMP) metric is applied to projected vehicle trajectories. Comparing different amounts of preview, the results show that short-range predictions - as little as 0.7 seconds ahead of the vehicle - are sufficient to prevent nearly all dynamics-induced rollovers in typical highway curves. These results are useful to determine the minimum preview windows that may be necessary for more advanced vehicle control methods, such as Model Predictive Control. (Investigators: Paul Stankiewicz, Dr. Alexander Brown, Dr. Sean Brennan)

There are many high-speed pursuit situations where there are simply no technological means to stop a pursued vehicle, and there are also many situations known to be quite dangerous to the officers involved. The National Institute of Justice, in a long-term effort to improve the effectiveness and safety of police pursuits, wishes to evaluate the safety and effectiveness issues involved with terminating a pursuit using a tire deflation device to incapacitate a pursued vehicle. This study will involve testing the commonly used devices at Mid-State Airport at varying speeds, varying tire technology, and with/without concurrent vehicle maneuvers i.e. a swerve. The test vehicle will be a fully instrumented, fully automated (un-manned) LTI fleet vehicle configured to emulate a car that may typically be involved in a high-speed police pursuit. (Investigators: Alex Brown, Dr. Sean Brennan, Dr. Zoltan Rado, Dr. Robert Gray; Sponsors: National Institute of Justice)

Imagine you are driving down a two-lane one-way city street when suddenly a car parked along the curb opens a door out into the street and the driver steps out into the road. What should you do? Do you have enough time to stop before hitting the driver and the car door? Is the lane next to you open, and if so, should you turn the wheel as fast as possible? Perhaps you should steer and brake at the same time, but how much of each? Now imagine that you are a computer and that you have access to information about the vehicle and your surroundings. What is the best possible maneuver? We are developing a rapid method for obstacle avoidance path planning that uses optimal control theory to generate trajectories. Compared to many current methods, this research uses analytical solutions to optimization problems as much as possible to reduce the computational complexity of the final algorithm. As a first step, we are developing a quick method to estimate the maneuver envelope of a vehicle for a simplified vehicle model. (Investigators: Mike Robinson, Dr. Sean Brennan)

This project addresses the problem by identifying appropriate regions of the state space within which the control efforts exerted by a small set of agents can influence the self-organized dynamics of the ensemble. The problem is considered in the context of the ability of a small set of connected vehicles to affect the self-organized traffic jam dynamics. The methodologies adopted in this approach make use of the kinematic wave theory of trafic flow and the notion of controllability to present the novel concepts of influential subspaces and the null and event horizons. Results indicate that there exists a strong spatial dependence that governs an agent's ability to influence the self-organized dynamics of large-scale multi-agent systems. Specifically, under certain simplifying assumptions, the results indicate that connected vehicles must be able to communicate over a span of a few kilometers in order to impact traffic jam dynamics. (Investigators: Kshitj Jerath, Dr. Sean Brennan)

The next generation of safety and vehicle automation will rely on precise positioning, yet GPS-based positioning is hampered by frequent blockages of the GPS signal, even in normal driving situations. This project develops prior work on terrain-based vehicle localization and tracking by extending the research to scenarios including low-cost sensors and real-time implementation. The work demonstrates that vehicle tracking is achievable in such scenarios. Specifically, the work uses an Unscented Kalman Filter with on-the-fly GPS-based initialization. Once initialized, the algorithm is able to maintain tracking in the complete absence of GPS signals. Tracking accuracies of 3-5 meters at low speeds and approximately 10 meters at high speeds have been demonstrated in real-time with simulated low-cost sensors. Efforts are currently underway to determine the theoretical lower bound on tracking accuracy and its dependence on system parameters. The terrain-based localization approach is merged with DSRC radio and vision-based technologies at Auburn University to create a robust alternative to GPS. (Investigators: Kshitij Jerath, Pramod Vemulapalli, Dr. Sean Brennan, Dr. Dave Bevly (Auburn University); Sponsors: Federal Highway Administration (FHWA) Exploratory Advanced Research Program)

The universe around us shows numerous examples of emergent behavior, i.e. collective or macroscopic behavior arising from interactions between agents at the microscopic level. Examples include cascading failures in power grids due to interactions (load transfer) between failed substations, formation of swarms due to interaction (distance keeping) between individual agents (robots, birds, fish etc.) and cognitive functions arising due to interactions (firing) between individual neurons.This project analyzes the impact of modifications in agent interactions at the microscopic scale on the aggregate or emergent behavior at the macroscopic scale. Specifically, previously developed master equation and mean field theory approaches are used to analyze such behavior across various systems such as self-organizing traffic jams, seizures in the human brain and swarming behavior in mobile robots. Additionally, identification of the appropriate aggregate scale for such analysis is performed using information-theoretic metrics developed from the concepts of entropy and statistical complexity. (Investigators: Kshitij Jerath, Dr. Sean Brennan)
As adaptive cruise control (ACC) technologies improve and make way into the mainstream vehicle market, it becomes necessary to study the impact of the interaction between ACC and human-driven vehicles on traffic flow. This project studies the impact of adaptive cruise control (ACC) algorithms on the formation of self-organizing traffic jams in medium-to-high density highway traffic. Human and ACC driving behaviors are modeled using the GM fourth model with appropriate model parameters. A master equation approach is used to model the traffic jams at mesoscopic scale. Further, mean field theory is used to reduce the probabilistic traffic jam dynamics to deterministic vehicle cluster or aggregate dynamics. Current work suggests that ACC results in higher traffic flows at the cost of increased susceptibility to congestion. (Investigators: Kshitij Jerath, Dr. Sean Brennan)

This project focuses on developing kinematic models of skid-steer robot movement that are easily adapted to changing terrains and robot designs. In this work, skid-steer movement is modeled using kinematic equations incorporating the Instantaneous Centers of Rotation (ICRs) between the tracks or wheels of the vehicle and the ground. The surface contact points of the tracks or wheels are in pure rotation around the ICR. The locations of the track or wheel ICRs relative to the geometric center of the robot provide information on the amount of slippage occurring during movement and are useful in predicting vehicle motion when the track or wheels speeds are known. In general, ICRs for moving rigid bodies are constantly changing, but prior work with skid-steer vehicles has found that the ICRs of the tracks or wheels are relatively constant, regardless of vehicle maneuver type, for low speeds on flat terrain. This property enables us to use a nonlinear estimator, an extended Kalman filter (EKF) in this case, to learn the ICR locations during operation through the measurement of vehicle position and heading. This algorithm has been implemented on both tracked and skid-steer platforms during operation at low speeds on flat terrain. The resulting estimations of ICR locations provide good prediction of vehicle motion when applied open-loop with only knowledge of input track of wheel speeds. Current and future work is focused on adapting the algorithm for use on non-flat terrains and field testing to determine the operational envelope for which the algorithm provides reliable ICR location estimates. (Investigators: Jesse Pentzer, Dr. Sean Brennan, Dr. Karl Reichard; Sponsored by Penn State EARP and ARL)

This project focuses on developing improved methods for measuring and characterizing robot and operator performance. The methods apply to a NIST ground robot testing validation method as well as its employment in operator and terrain variability studies for bomb disposal robot performance. The testing method developed improves on a novel robot tracking system developed previously and utilizes a standardized NIST testing arena. Overhead cameras and an onboard power logger capture data during a test, and computer algorithms are employed for further processing. Fiducial tracking and background subtraction algorithms calculate a robots position, speed, and lap progress over time during a test. Further processing is employed to calculate a robots most common path and subsequent deviation from this path, as a metric of consistency. Power usage and energy consumption over a test are also considered. Two primary applications of this testing method are demonstrated. Changing the terrain inside the testing arena between tests allows the robot performance metrics previously outlined to be studied as a function of terrain. Second, choosing one terrain of interest but utilizing different robot drivers for otherwise similar tests allows robot performance as a function of operator ability to be studied.(Investigators: Adam Crimboli, Dr. Sean Brennan, Dr. Karl Reichard Sponsors: This research is supported in part by funding from the National Institute for Standards and Technology, and Exploratory and Foundational Research Program, administered by the Penn State Applied Research Laboratory.)
This project investigates a model-based method for using a forward-looking monocular camera along with previewed road geometry from a high-fidelity, low-dimensional map to estimate lateral planar vehicle states by measuring the vehicle's temporally anticipated reference trajectory. It seeks to combine a computationally cheap, simple, and extensible feature detection strategy with the benefits of map-based estimation within a relatively simple estimation framework that gives a-priori predictions of algorithm performance. This is accomplished using a planar, linear "bicycle model" for lateral vehicle dynamics, which is shown to be sufficiently accurate for normal driving conditions. Rather than attempting to produce the best lane detector or state estimation strategy possible, this approach seeks to produce a framework that helps perception system designers determine the minimum amount of lookahead distance needed to achieve the best lateral vehicle state estimates possible, especially with low-cost sensors. (Investigators: Alexander Brown, Dr. Sean Brennan)

This project investigates using a forward- looking monocular camera along with previewed road geometry from a high-fidelity, low-dimensional map to estimate lateral planar vehicle states and guide a vehicle down a road using optimal preview control with estimated system states. Concrete performance and robustness metrics for the map-based stochastic preview control/estimation architecture, derived from linear system theory, allow for the design of control and perception systems maintain safety given a calculable minimum visibility threshold. (Investigators: Alexander Brown, Dr. Sean Brennan)
This project deals with the development of a Hardware-in-the-Loop (HIL) driving simulator designed with ROS and Gazebo. Analyses of current driving simulator software has unearthed a need for a simulation environment that also functions as a data acquisition and control framework, inclusive of HIL test functionality. Work is ongoing to develop an open-source HIL-centric driving simulator, with a close eye on optimizing scalable system performance in terms of system latency and extensibility. (Investigators: Nicolas Ochoa, Kevin Swanson, Dr. Alexander Brown, Dr. Sean Brennan)

This project focuses on the development and validation of a low-order model for a vehicle impact on a soil-fixed boulder embedded in cohesionless soil. Dimensional analysis is then applied to the low-order model to develop dimensionless equations of motion and scaling laws associated with small and full scale testing. Additionally, in-situ soil measurement methods are proposed which would enable rapid determination of the soil properties found within the low-order model, such as soil density and modulus of subgrade reaction. The vehicle is modeled as a lumped-parameter Maxwell model, the boulder is treated as a rigid body, and the soil is modeled as a system of lumped-parameter Kelvin models. The Maxwell model parameters for the vehicle are found by correlating an expected displacement response for a vehicle impacting a rigid wall to measured data from finite element simulations. The Kelvin model parameters for the soil are found through the proposed methods of in-situ soil testing and a derivation of soil damping using conservation of momentum. The measured and estimated lumped-parameter values are then used to simulate a vehicle impact on a soil-fixed boulder using numerical integration techniques. The simulation is then compared and validated against past full scale crash tests. The dimensionless equations of motion and scaling laws are used to simulate small scale vehicle impacts as well as correlate measured displacements from small scale crash tests to full scale crash tests. (Investigators: Mark Keske, Sam Hoskins, Dr. Alexander Brown, Dr. Sean Brennan)

Persons with disabilities are increasingly reliant on technology to provide freedom of mobility. However, current wheelchair technology requires extensive direct user joystick input, which limits functionality and creates error between the desired and actual system output. This research project aims to create a semi-autonomous navigation and control system for an electric wheelchair, which is more sensitive to the progression of neuromuscular diseases, resulting in improved freedom of mobility for those with Alzheimers, Parkinsons, multiple sclerosis (MS), amyotrophic later sclerosis (ALS), and Huntingtons disease. Additionally, the wheelchair as a smart platform enables health monitoring of the users disease progression. The project has developed a robotic wheelchair platform with sensors, computers, and a power management system to conduct robotic wheelchair experiments. A key focus of our ongoing work is to enhance the safety of wheelchair operation, investigate modality of user inputs, coordinate wheelchair motion events with user decision-making measurements both on the joystick and on EEG/EMG, develop GPS-free indoor localization technologies, and develop power management and monitoring strategies supporting users. The ultimate goal is to integrate the autonomous system with a computer-brain interface (BCI) to allow those with severe mobility impairments to regain navigational control in their daily-lives. (PIs: Sean Brennan and Jason Moore; Graduate Students: Kelilah Wolkowicz (Ph.D. Candidate); Undergraduate Students: Aditya Agarwal and Taylor Baum; Collaborators: Sun Han and Bruce Gluckmann; Sponsors: This work is supported by the National Science Foundation under Grant No. DGE1255832.)
Geometric design of highways is an important aspect of highway engineering, and in particular, horizontal curves on highways have higher accident rates compared to straight roads. Quantitative guidelines for horizontal curve design exist only for flat roads, but not downgrades. This project focuses on developing suitable vehicle dynamics models to determine acceptable horizontal curve geometries on downgrades. A friction demand versus friction supply approach is used to check whether the current horizontal curve design policies are acceptable for downgrades. Skid measurements from the field combined with a physics-based tire model are used to obtain the friction supply at various design speeds. This project develops analytical as well as low-order simulation-based models like bicycle model for a vehicle traveling on downgrade in order to find the friction demand of the vehicle. Results show that per-axle friction demand can be significantly higher compared to the overall friction demand which is basis of current design guidelines. The margins of safety are shown to significantly decrease with design speed, and in the case of even moderate braking, go to a very low value at high speeds. (Investigators: Tejas Varunjikar, Dr. Sean Brennan)

Rollover accidents are one of the leading causes of death on highways. A key challenge in preventing rollover via chassis control is the accurate prediction of the onset of rollover. This task is especially hard in the presence of terrain features typical of roadway environments, such as road superelevation (i.e. road bank), the median slope, and the shoulder down-slope. This project develops a vehicle rollover prediction algorithm that is based on a kinematic analysis of vehicle motion, a method that allows explicit inclusion of terrain effects. The solution approach utilizes the concept of Zero-Moment Point (ZMP) that is typically applied to walking robot dynamics. This concept is introduced in terms of a lower-order model of vehicle roll dynamics to measure the vehicle rollover propensity, and the resulting ZMP prediction allows a direct measure of a vehicle rollover threat index. (Investigators: Sittikorn Lapapong, Alexander Allen Brown Dr. Sean Brennan)

This study involves analyzing the distributions of vehicle parameters and their associated dimensionless parameters. The vehicle parameters used in the study are related to the bicycle model as well as roll and pitch dynamics. The parameters have been primarily collected and synthesized from the database of the National Highway Traffic Safety Administration (NHTSA) and more than 270 vehicle-dynamics-related literatures. A group of non-dimensional parameters has been created using dimensional analysis and the Buckingham Pi theorem. The reduced number of dimensionless parameters is being used to analyze system similarity across size scales. (Investigators: Sittikorn Lapapong, Dr. Sean Brennan)

This project focuses on the development of physics-based, empirical, and allometric models to determine ground robot capabilities and power requirements as functions of robot size and design. Physics-based models are utilized to determine the capability of a robot when performing tasks such as climbing stairs and traversing ditches. The models utilize robot design parameters, such as track length and center of gravity location, and powertrain properties, such as available torque, to determine robot capabilities. Experimental measurements were collected from a fleet of operational EOD robots including robot power usage while operating at varying speeds over different terrain types. These measurements have been used to model the power requirements for robot motion as a function of robot mass, velocity, and terrain type. Allometric (e.g. size-dependent) models were also developed for individual powertrain components as a function of required power from manufacturer data. These powertrain scaling models are combined with the physics-based capability and experimental power usage models to quickly determine robot design and mission feasibility. Current work in this area includes determining the effects of continuously variable transmissions on powertrain efficiency, development of hybrid robot powertrain models and control strategies, and evaluating mission feasibility by comparing robot capabilities and endurance with mission requirements. (Investigators: Jesse Pentzer, Dr. Sean Brennan, Dr. Tim Simpson, Dr. Karl Reichard, Dr. Chris Rogan; Sponsors: NAVEOD, Navy)

Hybrid powertrain systems can potentially provide many benefits for unmanned ground vehicles including extended mission duration (from several hours to tens of hours, possibly even days), the use of common fuels or batteries for both manned and unmanned systems, and integrated system health monitoring capabilities. This project, led by the Penn State Applied Research Lab, seeks to develop and demonstrate an extensible hybrid power and energy system for unmanned ground vehicles. The effort runs concurrently with the Technology Demonstration and System Development phases of the Advanced EOD Robotic Systems program at Penn State, and thus will be applicable to the entire AEODRS Product Family. Two key hardware challenges are being addressed as part of this research: Identification and evaluation of scalable power generation and energy storage technologies suitable for EOD robots; and development of hardware which allows component-level power control and load sharing, e.g. smart bi-directional DC/DC converters. The former is being investigated by this research group, while ARL is focusing on the latter. A primary goal of the study is to analyze hybrid system architecture and controllers in the context of scalability, in order to determine the power requirements for robots as a function of robot size. The following task items are being looked into: development of a scalable and generalized model for a robot hybrid powertrain, definition of representative mission profiles, development of hybrid powertrain control algorithms, optimal profile management using Dynamic Programming, and comparison of the resulting performances across different power train architectures to determine how sizing of hybrid components is best implemented between robot platforms and missions. (Investigators: Drew Logan, Dr. Sean Brennan; Sponsors: Department of Defense, NAVEOD Division)

Military convoys often operate in unpredictable and dangerous situations, including inclement weather conditions and combat zones subject to unexpected attack. This research initiative focused on mitigating rear-end collisions by improving driver-assist systems and vehicle-to-vehicle communications. This study examined commercial-off-the-shelf technologies and their compatibility with sensor/algorithm combinations to be installed on existing military vehicles. The goal of the study was to produce an inexpensive, unobtrusive, and easily-incorporated solution to warn drivers of impending collisions or unsafe driving situations. This project also examined other convoy-assist research including individual vehicle status monitoring within a convoy, GPS breadcrumb-based platooning, and vehicle string stabilization. (Investigators: Stephen Chaves, Sanket Amin, Dr. Joel Anstrom - LTI, Dr. S. Brennan - MNE/LTI, Ed Crow - Applied Research Lab, Karl Reichard - Applied Research Lab Sponsors: Department of Defense, Army TACOM)
![]()
There has been tremendous interest in recent years to develop techniques to locate and track a vehicle on the roadway to enhance the safety and security of the driver as well as develop collision-avoidance systems, driver-assist systems and autonomous vehicle control. The Global Positioning System (GPS) suffers from many issues including poor signal reception and slow update rate, which have prompted researchers to explore alternate map-based techniques of localization. In this approach the roadways are initially mapped by collecting sensor data and processing it to extract parameters of interest and their corresponding locations. The vehicle is then outfitted with the sensor and supplied the map. Map-based localization can be broken down into the global localization problem and the local tracking problem. In the case of global localization, the vehicle has no prior information about its location while in local tracking the vehicle knows its initial position and has to track itself in the map by locally minimizing the error between measured and mapped data. Typically the global localization methods utilize feature-matching techniques that perform matches using data structures like KD-trees or vocabulary trees. In contrast, local tracking algorithms utilize model-based tracking methods such as Kalman filtering or particle filtering. This work demonstrated a unifying approach that combined the feature-based robustness of global search with the local tracking capabilities of a particle filter. A particle filtering algorithm was implemented that uses the 'uniqueness' of features to localize and track the vehicle. Optimization of the classical particle filtering approach in terms of computational effort, memory requirements and accuracy of localization was performed. Using feature vectors produced from pitch measurements from Interstate I-80 and US Route 220 in Pennsylvania, this work demonstrated wide area localization of a vehicle with the computational efficiency of local tracking. (Investigators: Sneha Kadetotad, Pramod Vemulapalli and Dr. Sean Brennan)
In highway design, there is, in general, little consideration of the vehicle dynamics in development of highway and road-side features. The few software packages available to combine highway design with vehicle trajectory predictions as a rule do not consider driver reaction to roadside features, nor allow for drivers steering input. Even though simulations have been used to aid in some highway design applications, the use of multi-body simulations to evaluate roadway designs remains rare. In contrast, for decades vehicle dynamics simulation packages have been used for evaluation of vehicle performance, stability, and accident reconstruction. But these studies in general assume a flat roadway surface, so the influence of terrain on vehicle behavior is essentially negligible. With the increasing number of in-median rollovers, and increasing concern for cross-median frontal impacts, there is growing demand for improved median and shoulder designs to prevent the thousands of deaths per year caused by vehicle interaction with median and shoulder slopes. This study, using CarSim software, aims at evaluating the safety of highway medians through the simulation of off-road excursions. Several different vehicle classes, speeds, encroachment angles, and driver inputs were tested in the simulations. Resulting vehicle positions and state are being analyzed for various median profiles, with emphasis on investigating the design tradeoff between preventing vehicles from rolling over or entering the opposing lanes of traffic. The results from this study will support future highway safety evaluation, as well as the design and placement for new in-median cable barriers. (Investigators: Jason Stine, Dr. Sean Brennan, Dr. Eric Donnell; Sponsors: NCHRP 22-21 pooled fund in partnership with the Midwest Research Institute, The Thomas D. Larson Pennsylvania Transportation Institute (LTI), and the Mid-Atlantic Universities Transportation Center (MAUTC))
To study the interaction of the human driver with a vehicle, this project has begun rebuilding the existing driving simulator at the Thomas D. Larson Pennsylvania Transportation Institute with the live driving simulator software provided by CarSim. Current work incorporates the interfacing of three live animators from CarSim with three frontal projection screens. This will provide a 140 degree field of vision from the driver seat of the Mac truck cab. Future work will involve combining this system with EEG and eye-tracker measurements, as well as interfacing the driving simulator with live, external vehicles to allow for realistic study of human-driver interaction. (Investigators: Jason Stine, Cynthia LaJambe (LTI), Dr. Sean Brennan; Sponsors: The Thomas D. Larson Pennsylvania Transportation Institute)

This project seeks to develop a first-of-its-kind campus-wide Hardware-in-the-Loop network at Penn State University. This network uses internet-enabled data-acquisition systems and local power-processing interfaces to connect vehicle subsystems - fuel cells, novel batteries, ultracapacitors, flywheel energy storage systems, high efficiency electric drive motors, advanced combustion engine test stands, and chassis dynamometers - in different laboratories distributed over the wide geographic area of the Penn State campus. These components can "talk" with each other just as they would interact in a vehicle, and thus enable the study of the coupled interaction of these components. Hence, researchers can better understand advanced Hybrid Electric Vehicle (HEV) architectures, components, simulation models, and energy management controllers without requiring construction of a new vehicle for each experiment and thus advance understanding of such architectures that are years or decades from integration. The core challenge in developing a new HIL system is to solve issues of forming and operating a networked, embedded, distributed data-acquisition and control system where each node consists of a hardware or software representation of physical hardware. For most engineering systems, vehicles included, these nodes will often interact in a closed-loop manner such that unsupervised connectivity loss at each node may have catastrophic safety, cost, and data-quality implications. While other faculty are addressing the hardware platform deployments, our interest is to understand the influence of the node-to-node HIL communication interface including development and validation of low-order models of the hardware at each node. The HIL-specific challenges include finding communication sample rates and data lengths sufficient to maintain equivalence to true systems (Speed), finding scaling factors on the data such that one system can be correctly resized to interact with another (Scaling), and finding means to switch seamlessly between hardware and software representations such that there is no perceptible change in data (Switchover). (Investigators: Michael Petersheim, Dr. Joel Anstrom, Dr. Michael Lanagan, Dr. Andre Boehman, Jamie Clark, Kandler Smith, Dr. Dan Haworth, Ben Zile; Sponsors: Department of Energy, Advantech Inc. EAutomation Group, The MathWorks)

Ground robots continue to increase in capability, including higher speeds to keep up with running or mounted humans, greater traction to negotiate ever harsher terrain, and greater lifting and payload capacity. As a result, stability analysis and consideration in robot chassis control is becoming particularly critical to prevent rollover and sideslip instabilities. This project utilized a rolling-roadway simulator to test robot chassis stability and control using a testing concept similar to an aircraft in a wind-tunnel: a pseudo-stationary vehicle was driven on a moving treadmill surface. An advantage of this system is that it allows testing at all speeds and configurations, enables advanced chassis controller tuning, and safely permits fault-testing. This system can operate as a stand-alone robot chassis tester, or as a hardware-in-the-loop system wherein subcomponents of the robot are tested individually while operating within a moving robot. Additionally, the surface can be wetted, tilted right/left at beyond 20 degrees, and/or tilted fore/aft at up to 6 degrees. The lateral motion in particular is useful to examine the robot behavior at the limits of adhesion or under sharp turning motions. (Investigators: Adam Dean, Dr. Sean Brennan; Sponsors: Department of Defense (NAVEOD))
Copyright © 2021 - Sean Brennan - All Rights Reserved, Page Auto-generated at: 2022-04-22 15:37:02 , powered by MATLAB.
Template by OS Templates